採購 AI 機器人的時候,大多數 IT 決策者問的是算力,像是:這個系統有多聰明、模型有多大、推論速度有多快。但算力問的是受控狀態下的表現,真正決定一台機器人值不值得信任的,是出狀況的那個 moment —— 機器人是否還在等雲端回應?是否還在等中央處理器裁示?還是關節和感測器已經在 40 毫秒內根據內建邏輯自己做出了決定,人還沒察覺,而危險已經過去?NXP 執行長 Rafael Sotomayor 在 Computex 2026 的主題演講框架,回答的正是這個問題。
編撰/何信達
過去幾年,AI 在推理、語言、數學上的進展讓人目眩——解題、寫程式、下棋,這些人類覺得困難的事,機器做起來愈來愈不費力。但 1980 年代電腦科學家 Hans Moravec 就已經指出一個反直覺的現象:對機器而言,真正困難的不是推理,而是感知與動作。走路、抓握、在不平的地面保持平衡——人類不假思索就能完成的事,機器人至今仍在掙扎。
機器最難做到的,也正是機器人最需要的
這個觀察被稱為「莫拉維克悖論」(Moravec’s Paradox),它在機器人領域從未過時。原因在於,人類這些「簡單」的動作,背後是數十億年演化累積的神經迴路,精密程度遠超任何現代工程設計。
軟體世界正在用一套叫做「Harness Engineering」的方法嘗試解決類似的問題。這個概念由 HashiCorp 共同創辦人 Mitchell Hashimoto 在 2026 年初提出,核心命題是:「Agent = Model + Harness」——模型只是推理計算器,讓代理可靠運作的,是包裹在外的執行結構,負責驗證、記憶、錯誤控制。它把可靠性的責任從模型身上剝離,交給基礎架構層承擔。這個方向是對的,但它的運作邏輯仍然是序列式的:規劃、執行、驗證,一個角色接一個角色輪流上場。
[ 加入 CIO Taiwan 官方 LINE 、 Facebook 與 LinkedIn,與全球CIO同步獲取精華見解 ]
但我們都理解,人類神經系統從來不是這樣運作的。推理、協調、反射,這三件事會同時發生,各自負責,互不等待。Sotomayor 在演講中說得直接:你觸碰到燙的東西,手已經縮回來了,大腦還在處理「那很燙」這個訊息。讓手縮回來的,不是大腦,是脊髓——反射弧(reflex arc)的整合中心——它不需要請示任何人,它擁有那個決定。
這正是 NXP 認為實體 AI 架構應該效法的邏輯。【編按】Harness Engineering 與 Neural Axis 的並排比較為編輯詮釋,演講原文未提及 Harness Engineering。
三層智慧同時,不是三個角色輪流
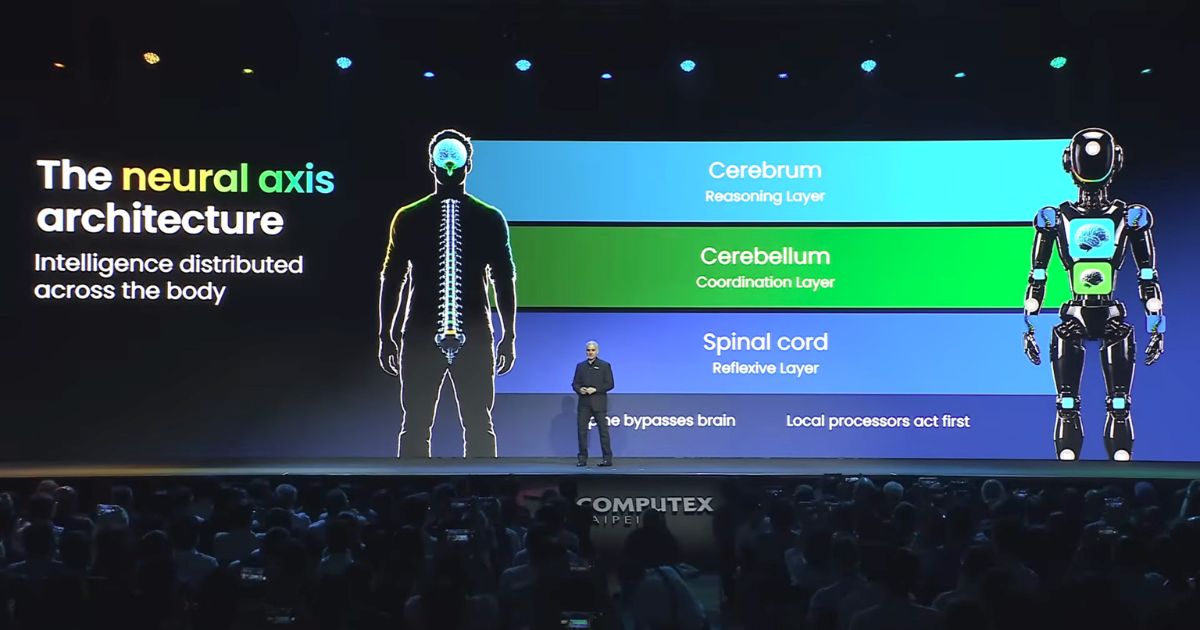
NXP 將這套邏輯具體化為一個架構框架,稱為「Neural Axis」(神經軸心架構)——三層智慧,各自擁有決定權,同時運作。
- 最上層是推理層(Reasoning),負責規劃、導航、決策下一步做什麼。
- 中間是協調層(Coordination),管理動態平衡與運動控制,確保系統在執行過程中維持穩定。
- 最底層是反射層(Reflex),直接連接感測器與致動器,不等待上層指示,在毫秒內自主完成判斷與動作。
三層獨立,但高度協調。這個「獨立」不是設計上的偏好,而是安全的前提——任何一層出問題,其他層繼續運作,系統不會因為單點失效而整體崩潰。
Sotomayor 在演講中用三種不同形態的裝置示範這套架構的一致性。
無人機的推理層處理飛行路徑規劃與路徑優化,協調層管理飛行平衡與性能,反射層則連接馬達控制,在微秒內響應。NXP 追蹤一個他們稱為「glass-to-glass latency」的指標:從攝影機擷取畫面、處理、傳送,到控制器響應、無人機做出反應,整個迴路必須在 20 毫秒內完成。超過這個門檻,無人機開始漂移,失去穩定,可能墜毀。
軟體定義車輛(SDV)的架構對應更直接。推理層負責 ADAS 導航與決策,協調層管理車輛動態——NXP 的 S32N 系列處理器(5 奈米製程)在此層建立了市場位置。反射層則是 S32K 系列,直接管理煞車、懸吊等攸關生命的任務。兩個層次在邏輯上與實體上都是分離的,因為在一輛有人命在其中的車裡,任何單點失效都沒有容錯空間。
人形機器人是三者中最複雜的實作。Sotomayor 描述了一個場景:機器人在倉庫中搬運貴重易碎包裹,途中被掉落的棧板撞到,短暫失去平衡。接下來需要在 40 毫秒內完成五件事——恢復平衡、確認包裹還在、調整握力、重新定位、繼續行走。沒有雲端呼叫,沒有等待模型回應。手知道怎麼抓,腳踝知道怎麼平衡,不需要請示,不需要等待,各自擁有那個決定。
三種形態,一套架構。Neural Axis 的價值不在於它為每種裝置客製化了不同的解法,而在於它提供了一個可以跨形態複製的設計邏輯——當我們在評估一套實體 AI 系統時,這個邏輯給了我們一個具體的篩選標準:這套系統的三層,是真的各自擁有決定權,還是只是在同一個中央處理器裡跑的三個執行緒?【編按】末段「三個執行緒」的比喻為編輯詮釋,演講原文未使用此比喻。
機器人有視覺,不代表它理解
Neural Axis 解決了動作的問題,但動作和理解是兩件事。
一台機器人可以精確識別眼前的瓶子——判斷材質、讀取標籤、估算重量——卻不知道如果傾斜超過某個角度,液體會溢出。感知告訴它眼前有什麼,但沒有告訴它與那個物體互動之後會發生什麼。重力、慣性、摩擦力,這些物理規律不會出現在影像辨識的輸出裡。沒有這層理解,機器人的動作再精確,在真實環境裡仍然是危險的。
這個缺口,目前有兩種方法在填補。
第一種是「人工示範」。工程師親自教機器人如何抓取物件、如何移動,機器人模仿、學習、固化。這個方法有效,但它的規模化極限很快就會到——每一個新場景、新物件、新任務,都需要重新示範,成本高,速度慢。
第二種是「世界模型」(World Models)。不讓機器人親身經歷每一種真實情境,而是直接注入對物理規律的理解——讓機器人在沒有碰過熱爐子之前,就已經知道熱爐子會燙。Sotomayor 用了一個直接的比喻:這像是《駭客任務》裡的知識注入,不需要藉由親身體驗才能獲得經驗。世界模型目前是學術界與產業界最活躍的研究領域之一,尚未大規模商業部署,但進展速度快。
世界模型驅動的,是另一個正在快速成熟的技術:VLA——視覺語言行動模型(Vision-Language-Action Model)。VLA 是感知與理解之間的橋樑,整合了機器人看到的畫面、接收到的語言指令、以及需要輸出的動作,三者在同一個模型內處理,直接輸出可執行的低階控制訊號。它讓機器人不只能看,還能依據對真實世界的理解來決定怎麼作動。
但 VLA 有一個部署上的現實問題:這些模型在雲端研究環境裡訓練,資源幾乎無限;移植到工廠地板上的邊緣裝置,面對的是嚴格的功耗上限、記憶體限制、毫秒級的延遲要求。也就是,研究筆記本裡跑得動的模型,不代表能在倉庫機器人的處理器上即時運行。
NXP 的回答是 eIQ Toolkit——一套軟體工具,讓開發者把雲端訓練好的模型導入、壓縮、編譯,針對目標硬體調校。壓縮的手段包括量化(quantization,降低數值精度以減少運算量)與剪枝(pruning,移除對結果影響微小的神經元),讓原本只能在伺服器上跑的模型,能在邊緣裝置的嚴格資源限制內即時運行。目標是移除部署摩擦:把「模型能不能跑在這顆晶片上」這個問題,從客戶需要自己解決的難題,變成 NXP 已經處理好的前提條件。eIQ Toolkit 已商業部署,支援 i.MX 8 與 i.MX 9 系列處理器,並在 2026 年 1 月升級為模組化架構,新增 eIQ Agentic AI Framework,支援 A2A 與 MCP 標準。
Neural Axis 給了機器人可靠的身體,VLA 與世界模型給了它對真實世界的理解,eIQ Toolkit 讓這些理解能夠真正在邊緣裝置上運行。三件事缺一,實體 AI 就只是一個在受控環境裡表現良好的展示品。
信任四要素,要在設計時就內建
「實體 AI」與「雲端 AI」有一個根本差異,在系統出錯的時候最清楚:雲端系統當掉,工程師重啟服務;實體 AI 出錯,後果發生在真實世界,沒有 undo 鍵。
Sotomayor 在演講中說得直接:你無法用軟體更新處理一根斷骨,也無法用系統升級解決一場碰撞。這不是在說實體 AI 系統不能出錯——任何系統都會出錯——而是在說,錯誤發生的方式與後果,決定了信任必須在哪個層次被建立。
NXP 將信任拆解為四個要素。
- Contain(隔離):問題發生時,系統能將影響範圍限制在局部。冗餘設計與分層獨立,確保單點失效不會擴散成整體崩潰。這也是 Neural Axis 三層獨立運作的另一層意義——不只是速度,而是故障隔離。
- Protect(保護):安全機制直接注入硬體,不依賴軟體層。執行程式碼的完整性受到保護,防止竄改,憑證受到保護。NXP 明確提出「後量子密碼」(post-quantum cryptography)準備——今天的威脅模型與五年後不同,裝置的安全設計必須能跨越這個時間差。
- Verify(驗證):NXP 的「Safe Assured」計畫讓醫院或車廠 OEM 取得一份具體的保證——不是系統在正常狀態下表現如何,而是當事情不如預期時,裝置會怎麼反應。這份保證來自認證體系,包括功能安全標準 ASIL,不是廠商的自我宣稱。
- Adapt(適應):邊緣裝置的部署週期可長達十年。威脅持續演變,環境持續變化,裝置必須具備在整個生命週期內持續更新、維持安全完整性的機制。這對工業與醫療場景尤其關鍵——這些環境裡的設備不是每兩年換一次的消費性產品。
[ 推薦閱讀:黃仁勳演講,有哪些 Agentic AI 架構認知你需要更新?]
信任四要素合在一起說的是同一件事:信任必須從設計階段就內建進去,不能在系統部署之後再補。一台機器人上線的第一天,它的信任基礎就已經決定了。後續的軟體更新可以修補漏洞,但無法補上一個從來沒有被設計進去的安全層。
Sotomayor 說,NXP 從邊緣出發——這些安全與可靠性的要求,在汽車與工業場景裡已經做了幾十年,實體 AI 對他們而言不是新問題,而是既有能力在新場景下的延伸。
實體 AI 部署有何門檻,現在更加清晰
Sotomayor 在 Computex 2026 做的是框架宣示。Neural Axis、VLA、世界模型、信任四要素——這些概念在演講之前已經分散存在於不同的研究與產品公告裡。這場演講做的事,是把它們放進同一條敘事線告訴市場:實體 AI 的部署問題,現在有了一個可以被系統性討論的框架。
當這套系統在評估清單上出現,Neural Axis 的框架給了你幾個具體的判斷維度。反射層是真的在硬體上獨立運作,還是最終仍然等待中央處理器裁示。信任機制是從設計之初就內建進晶片,還是靠部署後的軟體層維持——Sotomayor 說得直接,信任不在一切順利的時候被定義,信任在最壞的那一刻被定義。感知背後有沒有對真實世界的理解,還是系統只是看得見,卻不知道互動之後會發生什麼。這對應的正是 Neural Axis、信任四要素、與 VLA 世界模型三條線。
軟體世界的 Harness Engineering 和硬體世界的 Neural Axis,回答的是同一個問題的不同面向:讓 AI 可靠運作,除了模型更聰明,而是在模型之外建立一層結構,讓失敗有邊界、讓決定有所有權、讓信任有根據。兩者都還在成熟過程中,但方向已經清楚。
(本文授權非營利轉載,請註明出處:CIO Taiwan)
